RÉFÉRENCES
Burrhus Skinner (1984), The Shame of American Education, American Psychologist, vol 39, n° 9
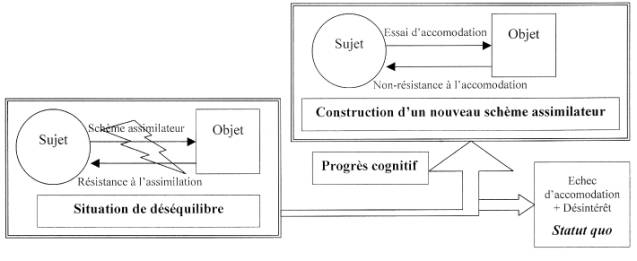
Jean Piaget (1975). L’équilibration des structures cognitives: problème central du développement (Chapitre 2. Le fonctionnement de l’équilibration) disponible sur le site de la fondation Jean Piaget
Jean Piaget (1936), Le problème biologique de l’intelligence, (un des nombreux documents disponibles sur le site de la fondation Jean Piaget)
Noam Chomsky (1984), La connaissance du langage, Grammaire générative et sémantique. Communications, n° 40
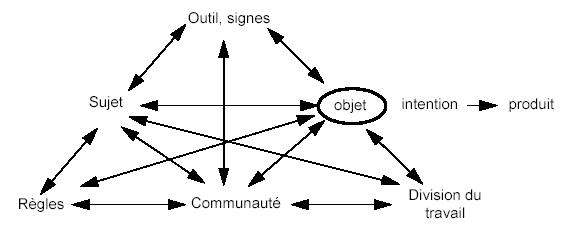
Y. Engestrom (2001), Expansive Learning at Work: toward an activity theoretical reconceptualization Journal of Education and Work, Vol. 14 n°. 1
L. Smith (1994), Skinner 1904-1990, Perspectives, revue trimestrielle d’éducation comparée, vol. 24, n° 3/4
J-L Le Moigne (1994-a), Les épistémologies constructivistes, Que sais-je? PUF, Paris
J-L Le Moigne (1994-b), Pourquoi je suis un constructiviste non repentant, document de travail
Ivan Ivic (1994), LEV S. VYGOTSKY (1896 – 1934), Revue trimestrielle d’éducation comparée, vol. 24, n° 3/4.
J-Y Rochex (1997), L’œuvre de Vygotski : fondements pour une psychologie historico-culturelle, Revue française de pédagogie.
C. Brassac (2003), Lev (Vygostki), Ignace, Jérôme et les autres…. Vers une perspective constructiviste en psychologie interactionniste, Technologies, Idéologie et Pratiques: revue d’anthropologie des connaissances, vol15 n°1.
R. Gagné (1968). Learning hierarchies. Educational Psychologist, 6, 1-9.
P.A Cooper (1993), Paradigm shifts in designed instruction: From behaviorism to cognitivism to constructivism. Educational technology
M. Gaussel, C. Reverdy (2013), Neurosciences et éducation: la bataille des cerveaux – Dossier IFÉ
S. Campbell, P. Pagé (2012), La neuroscience éducationnelle: enrichir la recherche en éducation par l’ajout de méthodes psychophysiologiques pour mieux comprendre l’apprentissage, Neuroéducation, Volume 1, Numéro 1
G. Tiberghien (1999), La psychologie cognitive survivra-t-elle aux sciences cognitives? Psychologie Française, Elsevier Masson, pp. 265-283
B. Fallery (2004), Les trois visions de la formation ouverte et leurs propositions de normes: Standardiser les contenus, les activités ou les interfaces? Systèmes d’Information et Management, vol 9 n°4
G. Ben Saad, M. Diani (2005), Repenser la coordination intra-organisationnelle des connaissances productives : d’une épistémologie de possession vers une épistémologie de pratique. Document de travail.
C. Bereiter (1997). Situated cognition and how to overcome it. In Situated cognition: Social, semiotic, and psychological perspectives, pp. 281-300
C. Feinet (1964), Les invariants pédagogiques, Éditions de l’École moderne française
R. Barbier (1998), L’éducateur comme passeur de sens, Centre international de recherches et études disciplinaires N° 12.
P. Lestage (2009), sur SlideShare support de cours sur la construction sociale de l’intelligence (Piaget/Vygotski)
Voir aussi les théories de l’apprentissage sur le Wiki « Edu Tech » de l’université de Genève
Voir aussi le site Learning Theories, qui liste plus de 150 théories (!) autour de l’apprentissage





 La plupart des
La plupart des