الأربعاء، 20 نوفمبر 2019
الخميس، 14 نوفمبر 2019
Quelques modèles 3D prêts pour le Merge Cube avec l'application "Object Viewer"
Quelques modèles 3D prêts pour le Merge Cube avec l'application "Object Viewer"
http://svt.discipline.ac-lille.fr/ressources/tice/realite-virtuelle-et-realite-augmentee/realite-augmentee-avec-le-merge-cube
| Nom du modèle | Code pour Object Viewer |
|---|---|
Crânes de Primates fossiles | |
| Crâne de Sahelanthropus tchadensis (Toumaï) | VPKQLV |
| Crâne de Homo floresiensis (LB1) | QDKENR |
| Crâne de Homo erectus (T. Noiriel d’après un fichier Sketchfab de l’Ohio State University Art and Design) | NVY226 |
Crâne de Homo erectus (pas de vue inférieure) (T. Noiriel d’après un fichier Sketchfab du Department of Archaeology, UCC, teaching collection) | 1YN5KJ |
Crâne de Homo heidelbergensis (T. Noiriel d’après un fichier Sketchfab de Geoffrey Marchal) | 55L080 |
Crâne d'Homo floresiensis (T. Noiriel d’après un fichier Sketchfab de Thomas Flynn) | R6DME8 |
Crâne de Homo rudolfensis KNMER 1470 (T. Noiriel d’après un fichier de Africanfossils.org) | KV5K84 |
| Crâne de Australopithecus africanus (T. Noiriel d’après un fichier sketchfab du Department of Archaeology, UCC, teaching collection) | 2V9BVJ |
Crâne de Paranthropus robustus (T. Noiriel d’après un fichier sketchfab de musehome) | NVYNMD |
Crâne de Homo naledi (T. Noiriel d’après un fichier de Morphosource, University of the Witwatersrand Evolutionary Studies Institute, Johannesburg, Gauteng, South Africa , Wits-Dinaledi-Reconstruction-1) | WKR8BV |
Crâne de Homo neandertalensis (T. Noiriel d’après un fichier du MNHN fourni par Antoine Balzeau) | GMJ90X |
Crâne de Homo habilis KNMER 1813 (T. Noiriel d’après un fichier de Africanfossils.org) | 6RV6WK |
Crâne de Homo erectus KNMER 3733 (T. Noiriel d’après un fichier de Africanfossils.org) | R6DMG8 |
Crâne de gorille (T. Noiriel d’après un fichier Sketchfab de Benoît Rogez) | 6RV0VK |
Crâne de bonobo (T. Noiriel d’après un fichier Sketchfab de HannahNewey) | GMJX02 |
Crâne de chimpanzé commun (T. Noiriel d’après un fichier Sketchfab de UhK8WwEp0Vnfbni) | LVGPMQ |
Crâne de chimpanzé commun (O. Vandendorpe) | BL40V0 |
Traces fossiles d'une activité culturelle | |
Vénus de Willendorf (P. Cosentino) | GMJ2GQ |
Feuille de laurier solutréenne (P. Cosentino) | KV5DK5 |
Crânes de Mammifères | |
Crâne de lion (N. Cohen) | XK080W |
Crâne de cheval (N. Cohen) | EX6J6Q |
| Crâne humain | EX6K9V |
Crâne de lapin ( lapin genre Sylvilagus C.Foveau d'après un fichier Sketchfab : archaeology labs of North Carolina at UNC-CH ) | NVY506 |
Crâne de chat 1 (C. Foveau d'après un fichier Sketchfab de Paolo Alemani Osteoarc Collection) | JY9D4P |
Crâne de chat 2 (N. Cohen d'après un fichier Sketchfab de DocCopemys) | 6RV2E0 |
Organes humains | |
| Coeur humain (C.Foveau) | P4PM1Q |
| Cerveau humain (C.Foveau) | EX65QX |
Oreille interne humaine (by P. Cosentino-W. Robert J. Funnell, PhD; Sam Daniel, MD, CM; and Daren Nicolson, MD, CM at McGill University) | GMJ2G2 |
| Clitoris avec complexe veineux de Kobelt (by P. Cosentino & O.Fillot) | KV5DE9 |
Embryon humain 4 semaines (C.Foveau d'après un fichier Sketchfab auteur: Aaron Ellis ) | 55L6GY |
Appareil reproducteur de la femme en section (C.Foveau d'après un fichier Sketchfab auteur: cvallance01 ) | 92EGV5 |
Appareil respiratoire (C.Foveau d'aprèsun fichier Sketchfab auteur: E-learning University Medical Center Groningen) Appareil bronchique avec quelques alvéoles pulmonaires devant les poumons Appareil bronchique avec quelques alvéoles pulmonaires sans les poumons
| 55LJ9B R6DKW1 0VPD56 |
Molécules | |
| Molécule d'adénosine diphosphate (ADP) : Surface | DL4MKE |
| Molécule d'adénosine diphosphate (ADP) : Sphères, coloration NPK | 1YNEP5 |
| ADN : bâtonnets, coloration par nucléotides | NVYKQX |
| substrat enzyme : ADN /enzyme Xp (par Xavier Vilport) | YVP8LQ |
Modèles cellulaires | |
| Modèle de cellule animale | YVP58R |
| Modèle de cellule végétale | 1XV0DX |
| Modèle de neurone (C.Foveau à partir d'un fichier Sketchfab de Jandys) | 92EXR0 |
| Neurone annoté 1 | EX6JYY |
| Neurone annoté 2 | 1YNRWK |
Modèles géologiques | |
Zone de subduction (coupe crustale 3D) (T. Noiriel d’après Profil crustal de P. Cosentino) | 55LYEB |
Zone de subduction complète (plan de Benioff, métamorphisme SV -> SB -> Eclogites, déshydratation, origine magma) (T. Noiriel d’après Profil crustal de P. Cosentino) | QD045G |
Zone d'accrétion océanique (coupe lithosphérique 3D) (T. Noiriel d’après Profil crustal modifié de et par P. Cosentino) | BL4R54 |
| Zone de rift médio-atlantique (P. Cosentino) | 8ER20R |
| Massif du Chenaillet (P. Cosentino) | VPKW6V |
| île de la Réunion (P. Cosentino) | NVYW2X |
Espèces disparues | |
Dodo Model (N.Cohen d'après un fichier Sketchfab du musée Horniman) | 8ER8R8 |
Crâne de Tyrannosaurus (Frédéric Labaune d'après un fichier Sketchfab de 3dhdscan ) | 49GKGQ |
- la comparaison des membres antérieurs de l’homme, du tigre et du cheval (Luc Liénard d’après le fichier « Limb Comparison » de Hong Nguyen sur SketchFab) | BL4 8L4 |
- Le fossile de Cœlophysis (exposé au muséum d’histoire naturelle de Londres) (Luc Liénard d’après le fichier « Cœlophysis » de Matthew Schroyer sur SketchFab) | JYJ J1J |
- Un nid de protocératops andrewsi (reconstitution exposée au muséum d’histoire naturelle de New-York) (Luc Liénard d'après le fichier « Protoceratops andrewsi - AMNH » de Shellie Luallin sur SketchFab) | VP0 05P |
الجمعة، 9 أغسطس 2019
مقاييس النقل الخاصة بأساتذة التعليم الثانوي
2. آخر عدد بيداغوجي ضارب 1.
3. عدد الأطفال في الكفالة: نقطة واحدة عن كل طفل ( في حدود 04 أطفال لا أكثر ).
4. التنفيل الخاص بالأقدمية العامة: 03 نقاط عن كل سنة دراسية إنطلاقا من العام الدراسي السادس إلى العام الدراسي العاشر.
05 نقاط عن كل سنة دراسية انطلاقا من العام الدراسي الحادي عشر.
5. التنفيل الخاص بالأقدمية داخل المندوبية الجهوية للتربية الحالية: نقطة واحدة عن كل سنة.
* مثال: 20 سنة أقدمية منهم 14 سنة داخل المندوبية الحالية و 18 عدد بيداغوجي و 03 أطفال يكون المجموع كالتالي:
20 + 18 + 3 + (5×3) + (10×5) + 14 = 120
● الحركة الوطنية داخل الجهة:نفس المقاييس الأربعة الأولى السابقة يضاف إليها التنفيل الخاص بالأقدمية بمركز العمل الحالي بحساب نقطة واحدة عن كل سنة.
● تقريب الأزواج بين الجهات:1. الأقدمية العامة: نقطة واحدة عن كل سنة.
2. آخر عدد بيداغوجي ضارب 1.
3. عدد الأطفال في الكفالة: نقطتان (02) عن كل طفل وفي حدود 04 أطفال لا أكثر.
4. المسافة الفاصلة بين مركز عمل طالب النقلة ومركز عمل القرين: نقطة عن كل 30 كلم (شريطة ألا تقل المسافة عن 60 كلم) والعدد يكون مكرر 30.
5. عدد سنوات البعد عن القرين:
- السنتين الأولى والثانية: 04 نقاط عن كل سنة.
- السنتين الثالثة والرابعة: 06 نقاط عن كل سنة.
- ابتداءا من السنة الخامسة: 08 نقاط عن كل سنة.
● تقريب الأزواج داخل الجهة:نفس المقاييس الثلاثة الأولى السابقة يضاف إليها التنفيل الخاص بالأقدمية بمركز العمل الحالي بحساب:
- السنتين الأولى والثانية: 0,5 نقطة عن كل سنة.
- السنتين الثالثة والرابعة: 01 نقطة عن كل سنة.
- ابتداءا من السنة الخامسة: 02 نقاط عن كل سنة.


السبت، 8 يونيو 2019
Framapad : Collaborer en ligne n’a jamais été aussi simple
Un « pad » est un éditeur de texte collaboratif en ligne. Les contributions de chaque utilisateur sont signalées par un code couleur, apparaissent à l’écran en temps réel et sont enregistrées au fur et à mesure qu’elles sont tapées.
Comment ça marche ?
- Créez un pad.
- Commencez à rédiger votre texte
- et invitez vos collaborateurs.
- Chaque participant se distingue par une couleur
- et peut tchatter avec le groupe.
- Si nécessaire, restaurez une ancienne version depuis l’historique
- et une fois votre travail terminé, exportez-le.

الأحد، 2 يونيو 2019
من أجل تطوير طريقة التقييم لمادة الإعلامية في امتحانات البكالوريا
منذ 1999 أول اختبار تطبيقي لمادة الإعلامية للشعب العلمية والإقتصاد والآداب شهد هذا الإختبار تحيينات طورت نظام الإعداد المادي واللوجيستي والإشراف والإصلاح والتقييم. فبعد أن كان الأستاذ يعد المخبر ويراقب ويقوم بالإصلاح لتلاميذه طيلة أيام الإختبار قسّمت هذه المهام على لجان إعداد مخابر وأخرى للمراقبة في مؤسسات أخرى وغيرها للإصلاح.
كما شهد أيضا محتوى الإختبار تطورا ملحوظا فبعد أن كان التلميذ يقوم بالقرعة لإختيار موضوع من اثنين Multimédia création des pages web أو من 8 مواضيع Pascal للشعب العلمية وبالنسبة لشعبة الإقتصاد كانت 2 مواضيع مولتيميديا و 4 Excel و 4 Word أصبحت المواضيع موحدة لجميع التلاميذ تجمع بين محورين في نفس الإختبار ( word+excel ou excel+acces ou excel+frontpage). كما أن بداية من سنة 2016 دخل على اختبار الشعب العلمية تغييرا كان في صالح التلميذ تمثل في ترجمة لبرنامج ثم تطويره (traduction d'un algorithme + développement).
وأخيرا شهدنا في هذه السنة 2019 طريقة تسجيل جديدة للشعب العلمية. فبعد أن كان التلميذ يسجل ملفه في مجلد bac20X تحت عنوان رقم تسجيله الحقيقي، طُـــلب من التلميذ احداث مجلد ليقوم بتسجيل 2 ملفات نسخة 0 تقتصر على الترجمة ونسخة 1 بها بقية البرنامج من أوله إلى آخره.
يذكر أيضا أن الإختبارات التطبيقية شهدت تغييرا طفيفا لم يدم طويلا (سنتي (2015 و2016) تمثل في اعداد 3 مواضيع في نفس الحصة لتقام عملية قرعة قبل بداية الحصة بحضور رئيس مركز الإختبار ومنسق الإختبار التطبيقي لنصل إلى نتيجة أن في نفس المعتمدية التي بها ثلاث مراكز إختبار يمكن أن يجتاز تلاميذ البكالوريا ثلاث مواضيع مختلفة بدرجات صعوبة مختلفة.
هذا ولن ننسى أول تجربة في تونس للإرسال مواضيع اختبارات البكالوريا عبر منظومة التراسل الإلكتروني المحمية كانت سنة 2018 في الإختبار التطبيقي لمادة الإعلامية
ما يمكن أن نستخلصه من هذه المسيرة أن ما وصلنا إليه اليوم من جودة في الإختبار التطبيقي لمادة الإعلامية لمختلف الشعب جاء إثر تجارب على مدى عقدين من الزمن قدّم فيها المشرفون على المادة أفكار جديدة ومتنوعة تطور بعضها بالنقد البناء وألغيت أخرى إما لعدم جدواها أو لصعوبات في التنفيذ أو لأسباب أخرى نجهلها وتبقى نتائجها مرجعا لإتخاذ قرارات أخرى جديدة من أجل تحسين نتائج الإختبار التطبيقي إعدادا وانجازا وتقييما.
ومن أجل هذه تحقيق هذه الأهداف وجب إشراك جميع أساتذة الإعلامية في استشارات موسعة يمكن أن تكون عن بعد (formulaire à remplir) تخصص في كل مرة لأحد المواضيع المهمة وقد سبق للعديد منهم تقديم اقتراحات أبرزها :
1. اعتماد اختبار وحيد تطبيقي لشعب الآداب والإقتصاد والتصرف والرياضة بضارب يساوي واحد. هذا الإجراء بالإضافة إلى كونه في مصلحة التلميذ الذي سيكتفي باختبار وحيد في نفس المادة ويقلص له من عدد ساعات الإختبارات النهائية في الدورة الرئيسية سيقلص أيضا من المصاريف المخصصة لإجتياز وتجميع وإصلاح الإختبار التي ستقدر هذه السنة في الإصلاح فقط (-شعبة الاقتصاد والتصرف : 39526، -شعبة الآداب 28632، -شعبة الرياضة : 1348) قرابة 79000 ورقة امتحان بحساب 3 دنانير لكل ورقة أي 237 ألف دينار. من هذا الرقم الأخير يمكن توفير مبلغ هام يقلص من ميزانية الامتحانات الوطنية المقدرة بين 16 و20 مليون دينار من نقل وطباعة وإعاشة ومواد مكتبية وأجهزة من جهة.والإستجابة لجزء من مطالب أساتذة الإعلامية المضمنة في العريضة الإلكترونية (مطالب أساتذة الإعلامية المستعجلة) من جهة أخرى (https://www.aredaonline.com/205135) وخاصة منها :
- إحداث منحة إعداد المخابر
- إسناد منحة مساعد رئيس مركز إختبار للأستاذ المنسق الذي يقضي أكثر من 10 ساعات يوميا ممتددة على مدى ستة أيام.
- اسناد منحة الإصلاح بحكم أن كل ملف هو عبارة عن ورقة كتابية تتضمن إجابة التلميذ في اختبار وطني
2. الترفيع في ضارب المادة في مختلف الشعب.
3. اعتماد صيغ جديدة في التقييم خاصة منها عن بعد (مثل اختبارات MTA et MOS)
في الختام نذكر أن لنا الثقة في حرص الجميع على الرقي بمادة الإعلامية ودورها في العملية التربوية ليس داخل قاعات الدرس فحسب بل وأيضا في الإدارة ولكن أهم مطالبنا هي التسريع في إجراءات التطوير فكل العوائق سهلة الإقتلاع.
أحمد بوعوني.
02 جوان 2019
الأحد، 19 مايو 2019
Barrière automatique
الثلاثاء، 14 مايو 2019
Comment fabriquer un Robot - Leçon 1 : Pour commencer
Index des leçons :
- Leçon 1 - Mise en route
- Leçon 2 - Choisir une plate-forme robotique
- Leçon 3 - Donner un sens aux actionneurs
- Leçon 4 - Comprendre les microcontrôleurs
- Leçon 5 - Choisir un contrôleur de moteur
- Leçon 6 – Contrôler votre robot
- Leçon 7 - Utiliser des capteurs
- Leçon 8 - Disposer des bons outils
- Leçon 9 - Assembler un robot
- Leçon 10 - Programmer un robot
Le Robot : un dispositif électromécanique capable de réagir d'une certaine façon à son environnement, et de prendre des décisions ou d'agir de façon autonome afin de parvenir à une tâche spécifique.
Connaissance et Apprentissage
 Afin de construire des robots de plus en plus complexes, la plupart des professionnels et des amateurs utilisent les connaissances qu'ils ont acquises lors de la construction des robots précédents. Au lieu de construire un robot, vous pouvez apprendre à utiliser des composants individuels avec pour objectif de construire votre propre « bibliothèque de connaissance » à utiliser pour entreprendre une plus grande conception, plus complexe, dans l'avenir.
Afin de construire des robots de plus en plus complexes, la plupart des professionnels et des amateurs utilisent les connaissances qu'ils ont acquises lors de la construction des robots précédents. Au lieu de construire un robot, vous pouvez apprendre à utiliser des composants individuels avec pour objectif de construire votre propre « bibliothèque de connaissance » à utiliser pour entreprendre une plus grande conception, plus complexe, dans l'avenir.Loisirs et Relationnel
 Construire un robot est en soi amusant et excitant. La robotique intègre des aspects de nombreuses disciplines, dont l'ingénierie (mécanique, électricité, informatique), les sciences (mathématiques et physique) et les arts (esthétique), et les utilisateurs sont libres d'utiliser leur imagination. Amuser les autres avec vos créations (surtout si elles sont conviviales et interactives) les aide à s'intéresser à ce domaine.
Construire un robot est en soi amusant et excitant. La robotique intègre des aspects de nombreuses disciplines, dont l'ingénierie (mécanique, électricité, informatique), les sciences (mathématiques et physique) et les arts (esthétique), et les utilisateurs sont libres d'utiliser leur imagination. Amuser les autres avec vos créations (surtout si elles sont conviviales et interactives) les aide à s'intéresser à ce domaine.Compétitions et Concours
 Les compétitions donnent les lignes directrices de conception du projet et une date limite. Elle confrontent votre robot aux autres dans la même catégorie et testent vos compétences en conception et en construction. Bien que de nombreux concours soient spécifiquement dédiés aux étudiants (du primaire à l'université), il existe aussi des concours où les adultes et les professionnels peuvent rivaliser.
Les compétitions donnent les lignes directrices de conception du projet et une date limite. Elle confrontent votre robot aux autres dans la même catégorie et testent vos compétences en conception et en construction. Bien que de nombreux concours soient spécifiquement dédiés aux étudiants (du primaire à l'université), il existe aussi des concours où les adultes et les professionnels peuvent rivaliser.Forme de vie autonome
 Les humains sont naturellement des créateurs et des novateurs. La prochaine grande innovation sera de développer une forme de vie entièrement autonome capable de rivaliser ou de dépasser nos propres capacités, voir même notre créativité. Cet objectif s'accomplit toujours par petites étapes par des individus, des organismes de recherche et des professionnels.
Les humains sont naturellement des créateurs et des novateurs. La prochaine grande innovation sera de développer une forme de vie entièrement autonome capable de rivaliser ou de dépasser nos propres capacités, voir même notre créativité. Cet objectif s'accomplit toujours par petites étapes par des individus, des organismes de recherche et des professionnels.Tâches professionnelles et domestiques
 Les robots domestiques aident à libérer les gens des tâches désagréables ou dangereuses et à leur procurer plus de liberté et de sécurité. Les Robots professionnels et de servicesont utilisés dans un grand nombre d'applications dans des environnements dangereux, de travail, publics, dans des endroits tels que la haute mer, les champs de bataille et l'espace, pour n'en nommer que quelques-uns. En plus des zones de services telles que celles de nettoyage, de surveillance, d'inspection et d'entretien, nous utilisons ces robots là où les tâches manuelles sont dangereuses, impossibles ou inacceptables. Les Robots professionnels et de service sont plus compétents, plus forts et souvent plus chers que les robots domestiques et sont parfaitement adaptés à un usage professionnel et/ou commercial.
Les robots domestiques aident à libérer les gens des tâches désagréables ou dangereuses et à leur procurer plus de liberté et de sécurité. Les Robots professionnels et de servicesont utilisés dans un grand nombre d'applications dans des environnements dangereux, de travail, publics, dans des endroits tels que la haute mer, les champs de bataille et l'espace, pour n'en nommer que quelques-uns. En plus des zones de services telles que celles de nettoyage, de surveillance, d'inspection et d'entretien, nous utilisons ces robots là où les tâches manuelles sont dangereuses, impossibles ou inacceptables. Les Robots professionnels et de service sont plus compétents, plus forts et souvent plus chers que les robots domestiques et sont parfaitement adaptés à un usage professionnel et/ou commercial.Sécurité et Surveillance
 La plupart des robots mobiles sont utilisés pour s'aventurer dans des zones où les humains ne doivent ou ne peuvent pas aller. Les robots de différentes tailles (qu'ils soient télécommandés, semi-autonomes ou entièrement autonomes) sont un choix idéal pour ces tâches. Exemple pratique Nous prévoyons que la plupart d'entre vous qui suivez ce guide a pour objectif de construire un robot pour l'apprentissage et les connaissances, mais aussi pour le plaisir pur ; bien que beaucoup aient une idée ou un projet spécifique qu'ils souhaitent concrétiser. Le dernier facteur important est le budget. Il est difficile de savoir exactement ce que les gens ont à l'esprit quand ils construisent leur premier robot ; certains peuvent déjà souhaiter construire un robot de déneigement autonome, tandis que d'autres ne souhaitent simplement que réaliser une horloge intelligente. Un robot mobile programmable simple peut coûter environ 100 $, tandis qu'un autre plus complexe peut valoir plusieurs milliers de dollars. Dans cet exercice, nous avons choisi de réaliser une plate-forme mobile afin d'obtenir une compréhension des moteurs, des capteurs, des microcontrôleurs et de la programmation, et d'inclure un grand choix de capteurs. Nous prévoyons un budget d'environ 200 à 300 $ car nous voulons qu'il soit suffisamment complet.
La plupart des robots mobiles sont utilisés pour s'aventurer dans des zones où les humains ne doivent ou ne peuvent pas aller. Les robots de différentes tailles (qu'ils soient télécommandés, semi-autonomes ou entièrement autonomes) sont un choix idéal pour ces tâches. Exemple pratique Nous prévoyons que la plupart d'entre vous qui suivez ce guide a pour objectif de construire un robot pour l'apprentissage et les connaissances, mais aussi pour le plaisir pur ; bien que beaucoup aient une idée ou un projet spécifique qu'ils souhaitent concrétiser. Le dernier facteur important est le budget. Il est difficile de savoir exactement ce que les gens ont à l'esprit quand ils construisent leur premier robot ; certains peuvent déjà souhaiter construire un robot de déneigement autonome, tandis que d'autres ne souhaitent simplement que réaliser une horloge intelligente. Un robot mobile programmable simple peut coûter environ 100 $, tandis qu'un autre plus complexe peut valoir plusieurs milliers de dollars. Dans cet exercice, nous avons choisi de réaliser une plate-forme mobile afin d'obtenir une compréhension des moteurs, des capteurs, des microcontrôleurs et de la programmation, et d'inclure un grand choix de capteurs. Nous prévoyons un budget d'environ 200 à 300 $ car nous voulons qu'il soit suffisamment complet.
 Pour de plus amples informations concernant l'apprentissage de la construction d'un robot, veuillez consulter le Centre de formation de RobotShop. Consultez le Forum de la communauté RobotShop pour demander de l'aide dans la construction de robots, présenter vos projets ou simplement discuter avec d'autres collègues roboticiens.
Pour de plus amples informations concernant l'apprentissage de la construction d'un robot, veuillez consulter le Centre de formation de RobotShop. Consultez le Forum de la communauté RobotShop pour demander de l'aide dans la construction de robots, présenter vos projets ou simplement discuter avec d'autres collègues roboticiens.الاثنين، 13 مايو 2019
Théories de l’apprentissage : behaviorisme, cognitivisme, socio-constructivisme
http://www.sietmanagement.fr/theories-de-lapprentissage-individuel-transmettre-construire-echanger-j-piaget-l-vygotksi/
Les schémas
Définition des principaux concepts
- apprendre c’est transmettre des savoirs, en renforçant des comportements (le béhaviorisme);
- apprendre c’est traiter de l’information, par les mécanismes mentaux internes constitutifs de la pensée et de l’action (le cognitivisme).
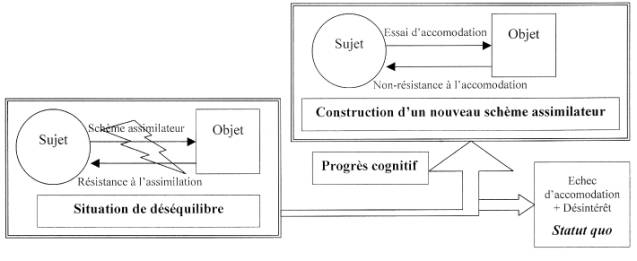
- apprendre c’est construire des images de la réalité dans des situations d’action (le constructivisme);
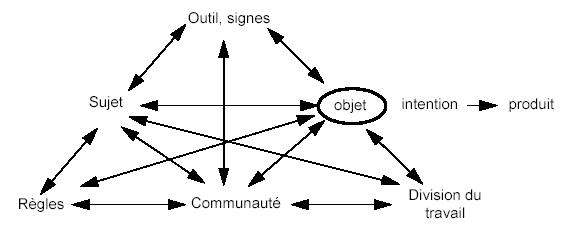
- apprendre c’est échanger du sens, dans des rapports sociaux (le socio-constructiviste).
- le débat scientifique sur le cerveau « scientifique ou social » (Gaussel et Reverdy 2013 : 41 pages, avec une belle bibliographie);
- les nouveaux rapports encore à construire entre neurosciences et psychologie cognitive (Tiberghien 1999);
- l’avancée de la recherche en neurosciences éducationnelles (Campbell et Pagé 2012);
- les travaux soutenant une vision du développement du cerveau, vision empreinte d’une bonne part de déterminisme biologique (Dehaene 2007 : Les neurones de lecture, lien);
- dans le cadre de l’Intelligence artificielle, une introduction au fonctionnement de la pensée et du cerveau sur le site Interstices;
- les travaux de A. Damasio sur les liens entre raison et processus émotionnels, dans Neurosciences et décision.
- d’une part l’appropriation de connaissances est directement issue des rapports sociaux, médiatisés par le langage et la culture : « on ne connaît que ce que l’on peut dire », et donc ce qui est socialement racontable (voir aussi les théories de la narration dans Communication et Storytelling).
- d’autre part il existe alors une zone proximale de développement, un potentiel qui caractérise les possibilités d’apprentissage qu’un individu peut compléter avec l’aide de tiers, par une compréhension mutuelle des actions de l’autre (le « médiateur »). L. Vygotski est un auteur souvent cité dans les études qui font appel aux Théories sociales de la communicationqui placent la relation dans son contexte.